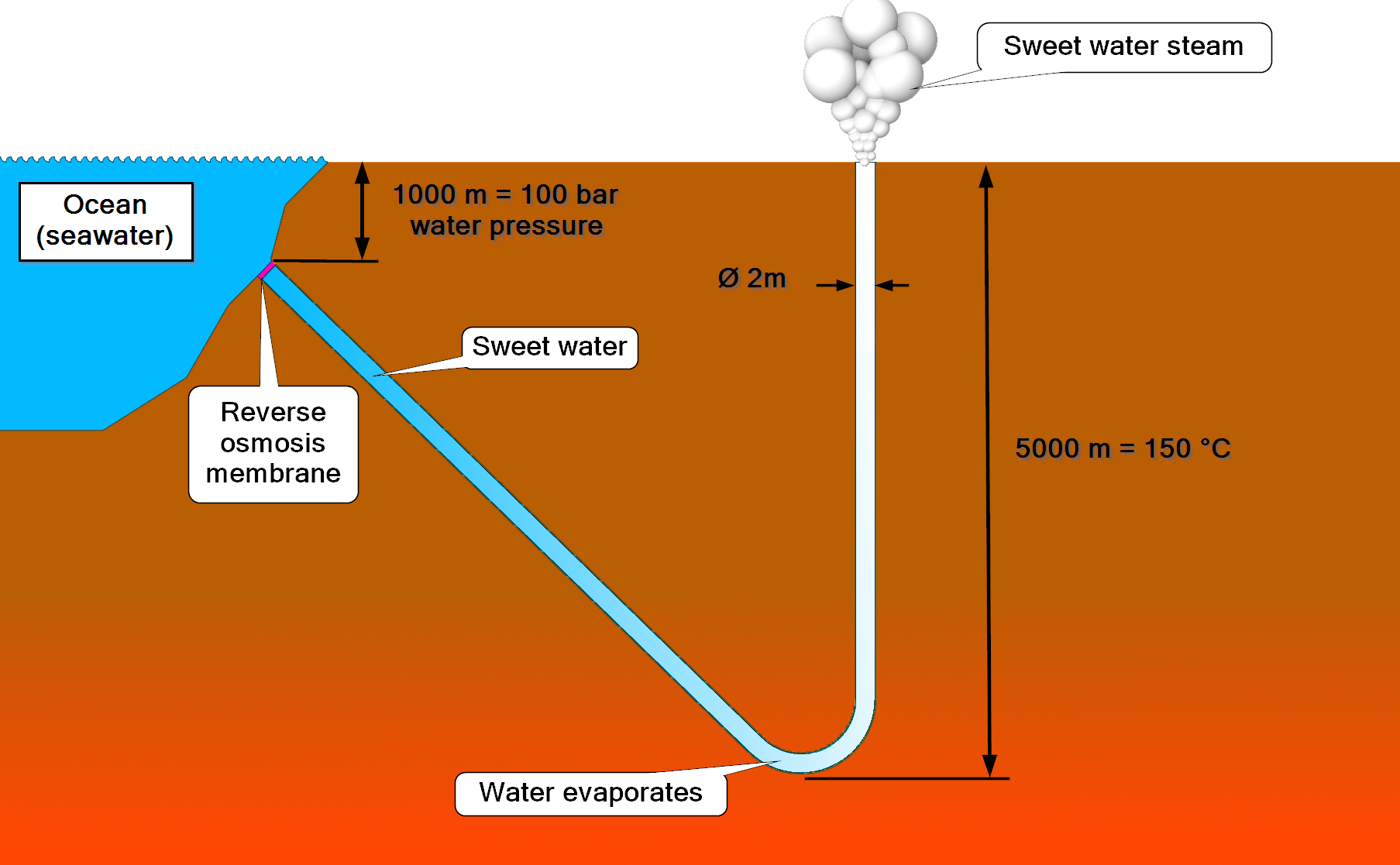
Produce electricity and sweet water at the same time
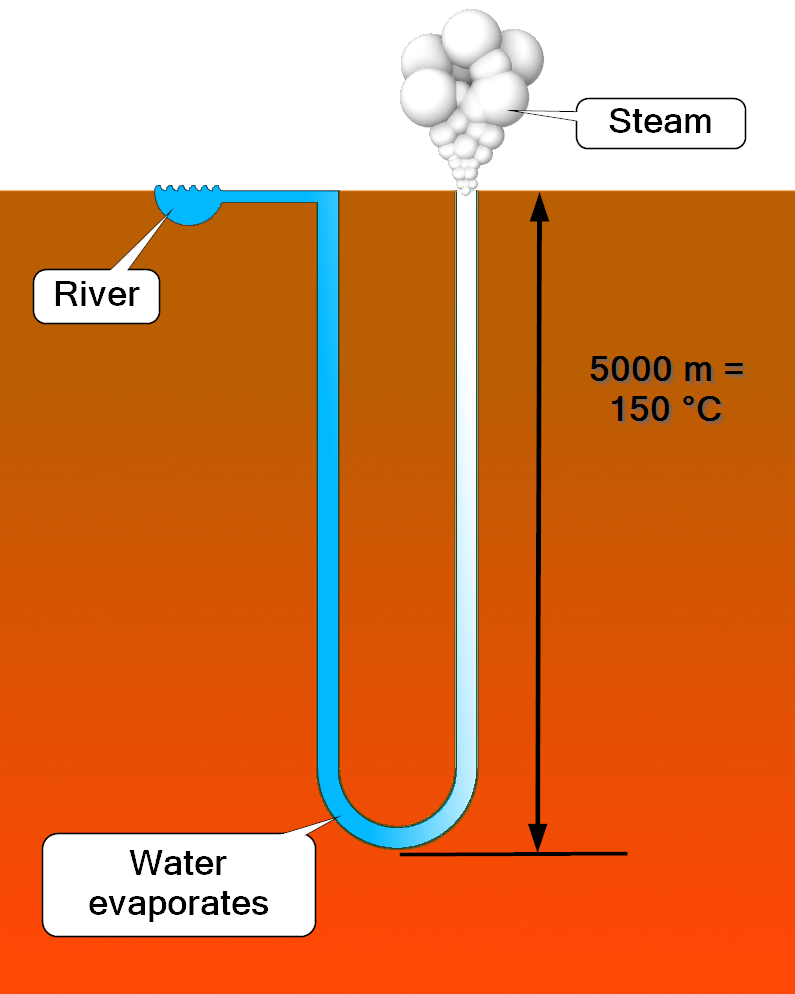
Or, of course, just produce electricity:
Once established, reliable, weather independent, 365 days a year, 24 hours a day, for eternity.
Wouldn't that be great? The most crucial question probably is "how do you dig that hole"?
Digbot
Drill deep holes without drill pipes. With a bot working autonomously.
Image 1: We have a hole with about 2 meters in diameter.
The hole is lined with a shell of wall segments so that a bot can travel up and down in it.
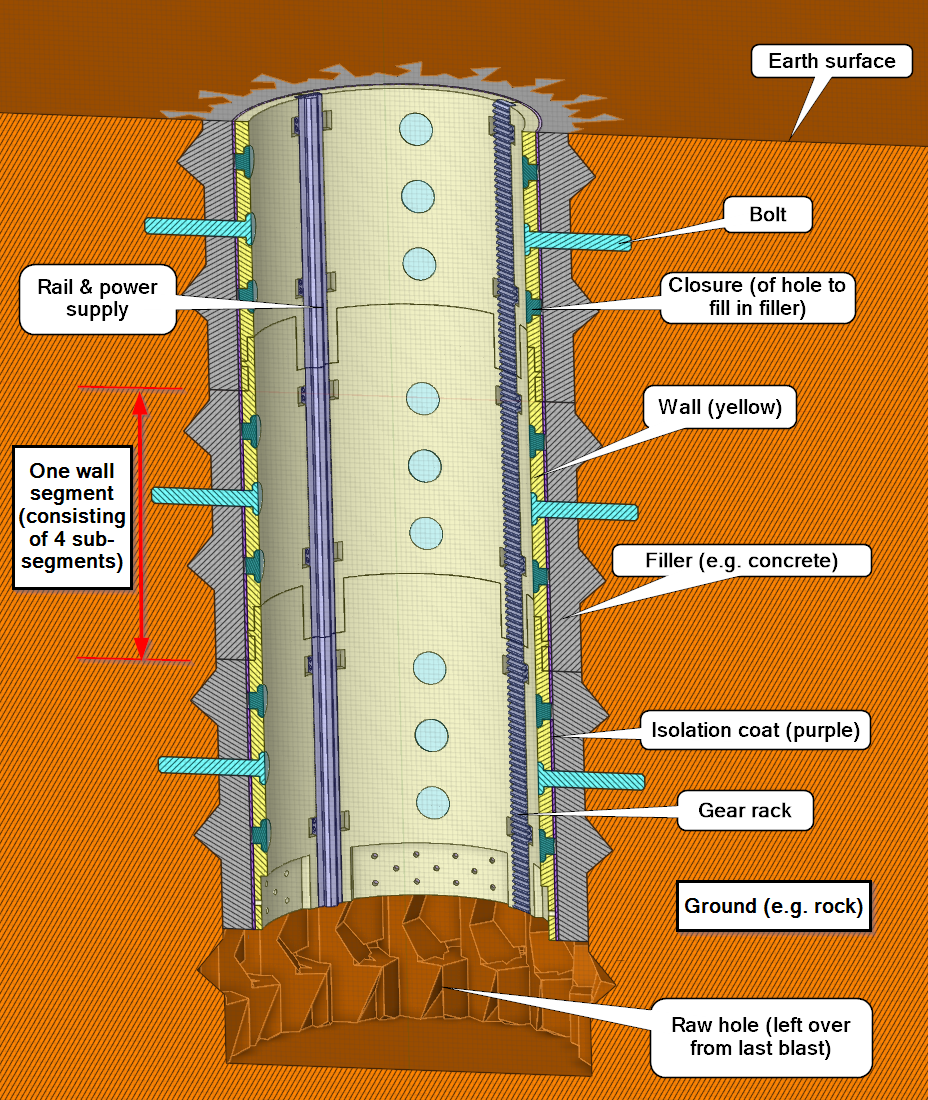
Image 2: This is the bot:
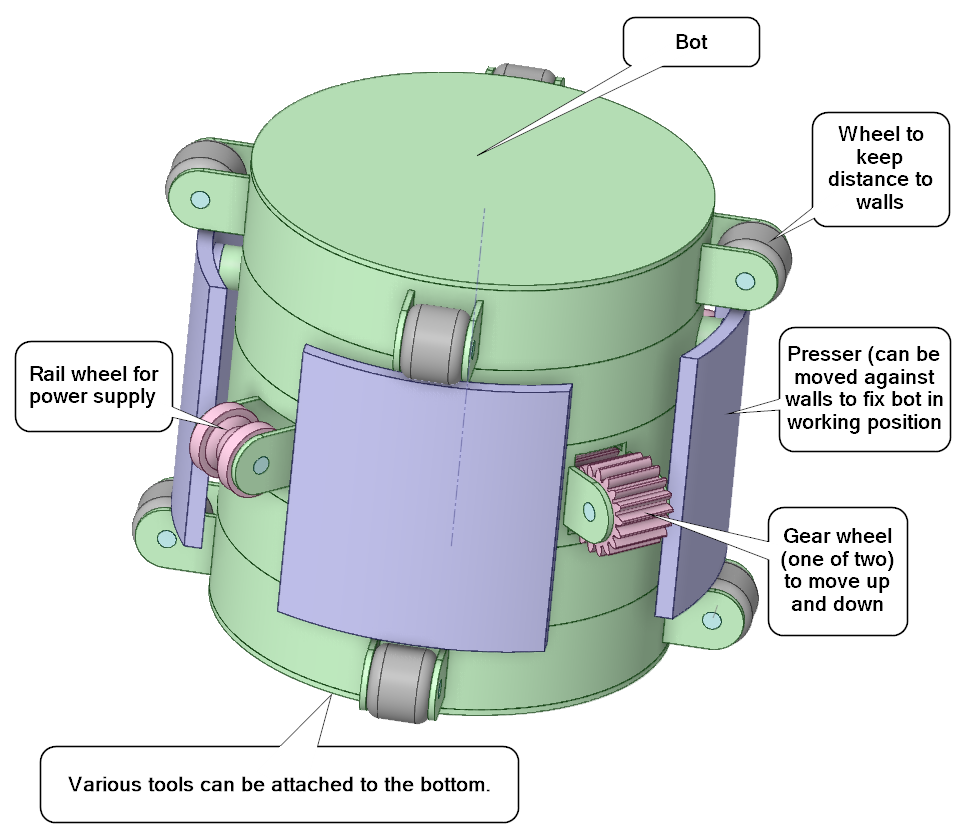
Image 3: This is the bot in the hole:
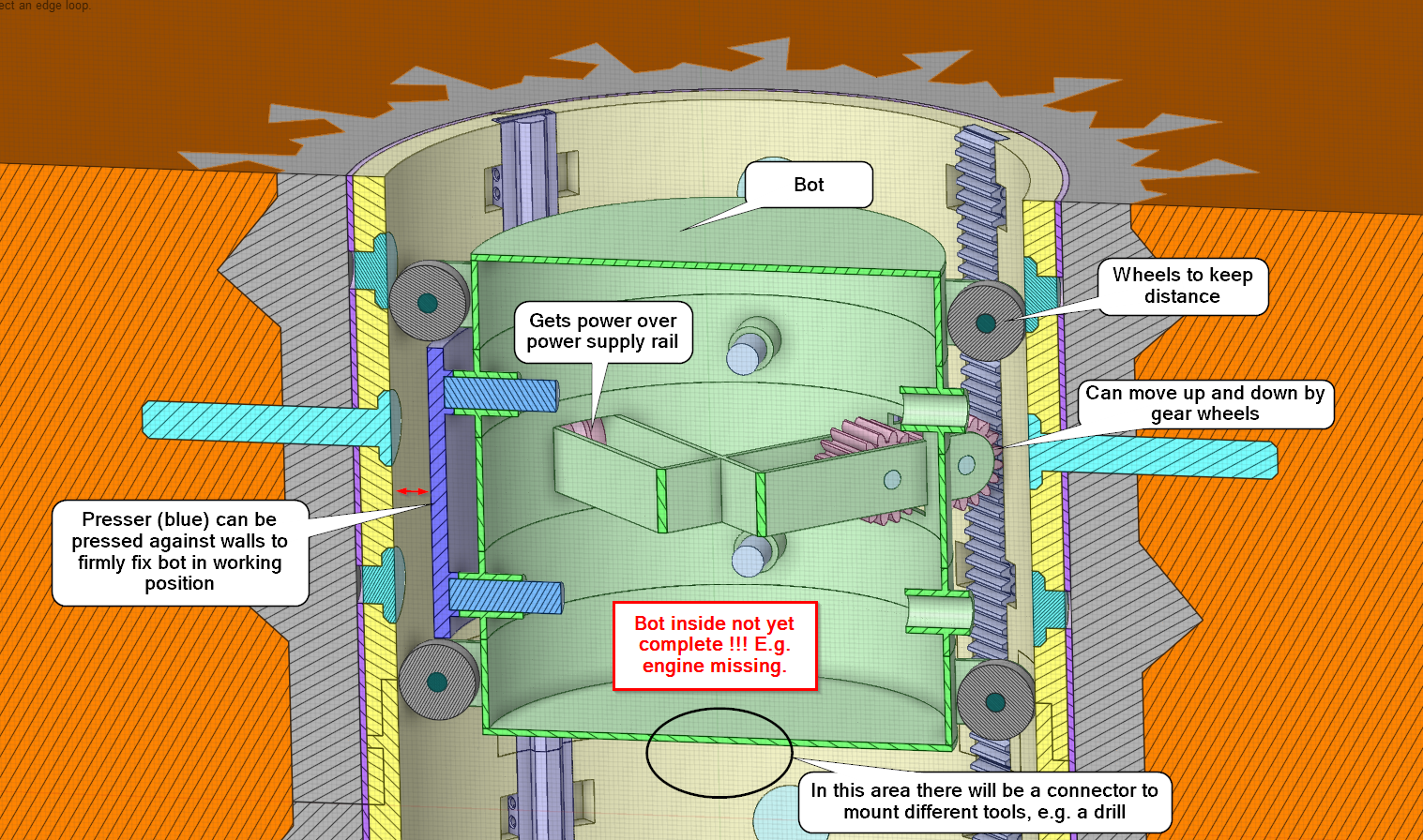
Image 4: The hole without bot seen from above:
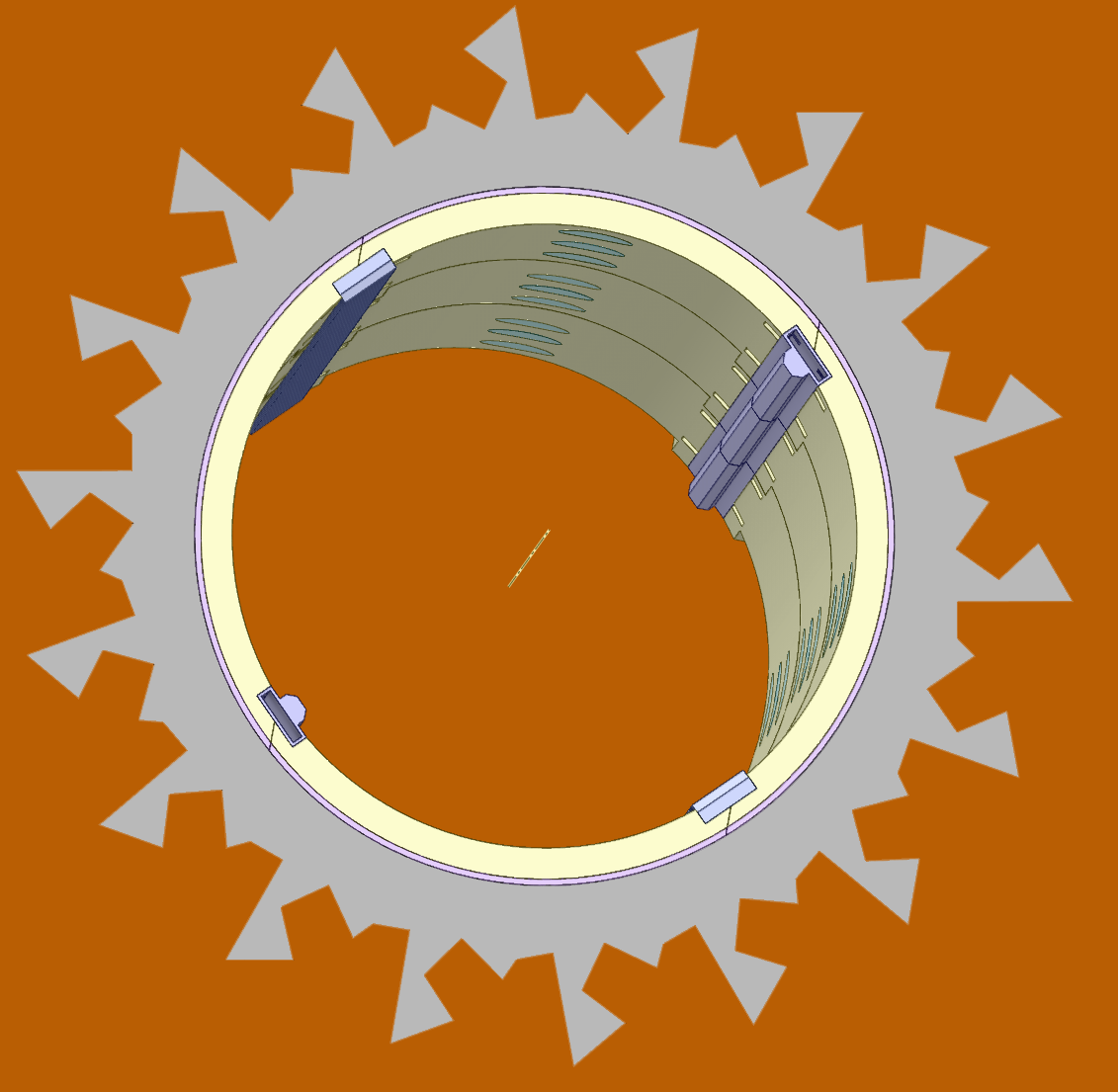
Image 5: The bot seen from above:
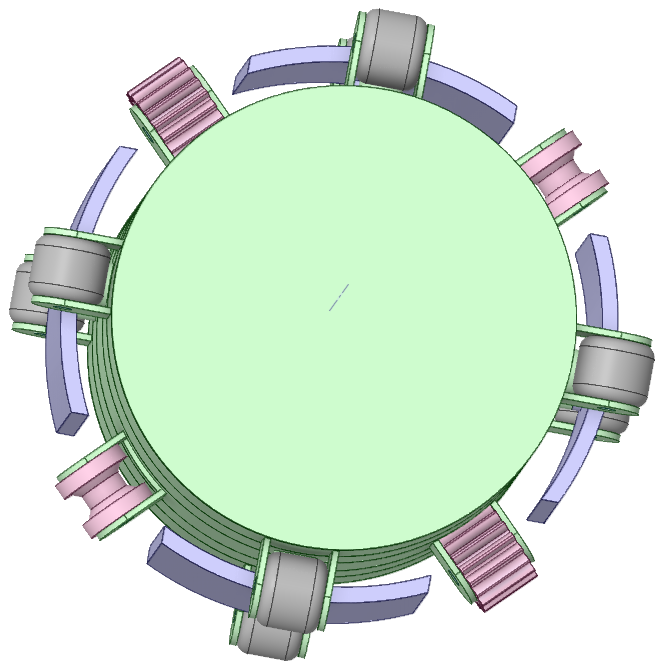
Image 6: Bot in hole seen from above:
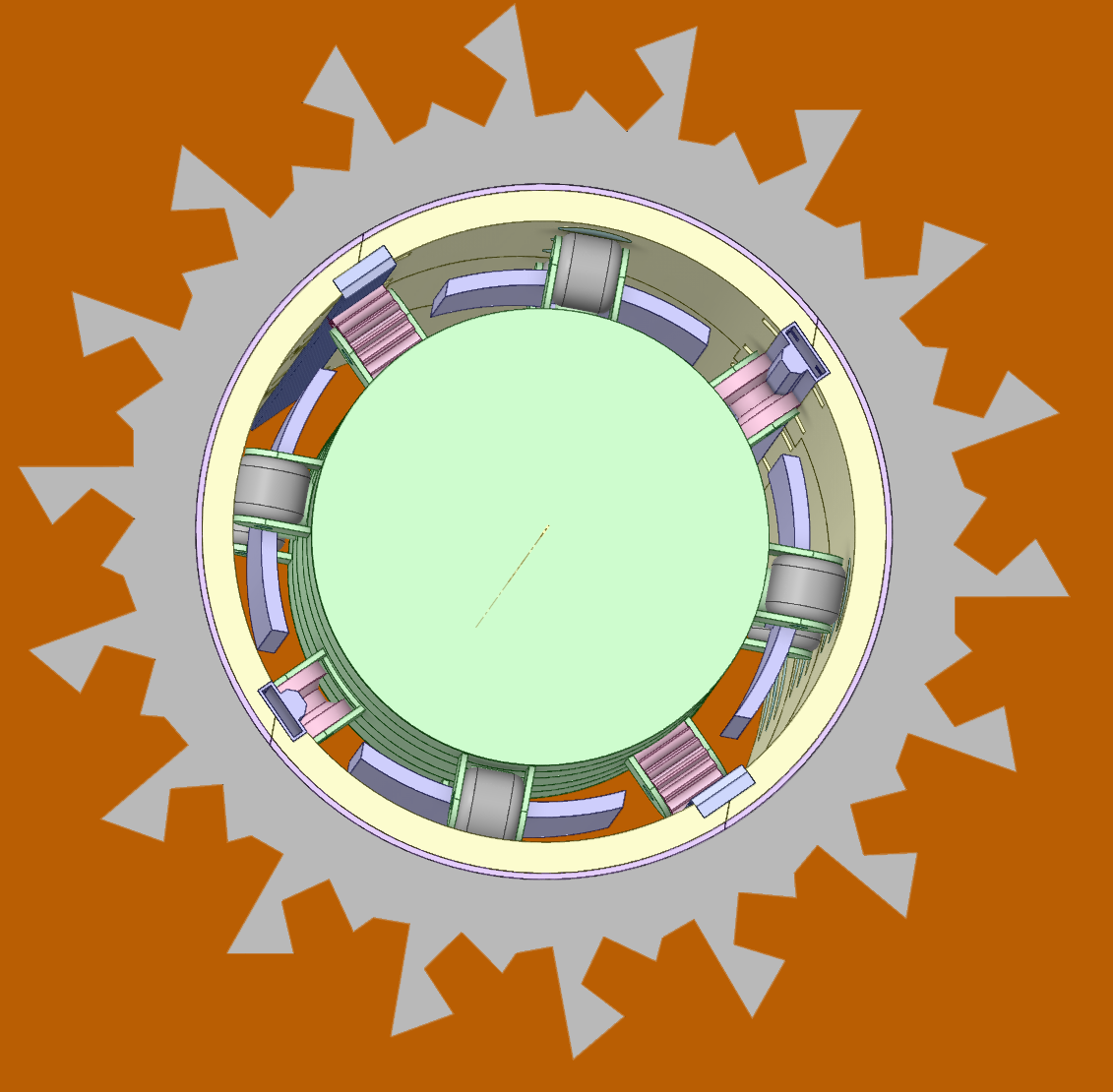
Image 7: How one wall segment is assembled from four wall sub-segments:

Various tools (not yet illustrated) can be attached to the bottom of the bot.
They are supplied with power from the bot's power supply. Every tool is comparably simple and fulfills just one task. For every new problem arising (and there will be plenty) we construct a specialized tool.
To add a new wall segment, the workflow is as follows:
To add a new wall segment, the workflow is as follows:
- The bot mounts a drill tool to drill small holes and goes down to the bottom of the hole. There, it drills several small holes in the raw rock at the bottom. Then, the bot goes up again.
- The bot mounts a tool to insert explosives into the small holes drilled before and goes down to the bottom of the hole. Down there, the tool inserts explosives into the small holes. Then, the bot goes up again.
- The explosives are detonated
- The bot mounts a tool to clean up the rock parts and goes down to the bottom of the hole. Down there, the tool picks up the rock parts and stores them in a container attached to the bot. Then, the bot goes up again and releases the tool and the container with the rock parts.
- If necessary, the bot mounts a tool to fine-shape the newly created extension of the hole and goes down to the bottom of the hole. The tool shapes the end of the hole so that an additional wall segment has enough space. Then, the bot goes up again.
- If necessary, the bot mounts a cleaner tool to pick up the waste the tool before produced, goes down and comes back with the waste. Now, the hole is ready for a new set of four wall sub-segments.
- The bot goes down with the first two wall sub-segments and attaches them to the connector holes of their respective predecessors. Then, the bot goes up again.
- The bot goes down with the remaining two wall sub-segments and attaches them to the connector holes of their respective predecessors. Then, the bot goes up again. Now, the new wall ring is complete, but not yet attached reliably.
- The bot goes down with two gear rails and two power supply rails. Both have nubs on their backsides. The nubs serve to connect the wall sub-segments to each other to form a solid ring. The bot attaches the rails to the wall sub-segments and goes up again.
- The bot goes down with a drill tool to drill horizontal holes that will receive the bolts to anchor the wall segments in the surrounding rock. The drill tool drills the horizontal holes and the bot goes up again.
- The bot mounts a cleaner tool to pick up the waste the tool before produced, goes down and comes back with the waste.
- The bot goes down with a tool to insert the bolts in the holes drilled before. The tool inserts the bolts and the bot comes up again.
- The bot goes down with a tool to press a filler (e.g. concrete) in the gap between the wall segments and the surrounding rock. The tool presses the filler in the holes in the wall sub-segments foreseen for that task. Then, the tool closes the holes with closures and the bot goes up again.
- After the concrete is hardened, the new wall segment is finished and the workflow starts over again.
Conclusion
Once having developed the bot, the membrane and all the tools and having a running system once (which will admittedly be difficult and extremly expensive), building further plants using the proven technology may take quite a long time (because the bot has to go up and down many times). But it should be comparably inexpensive, because by working autonomously, the bot saves the most expensive cost factor: human labour.
Regarding the very high cost of developing the system, but also the benefits it offers, the project could be publicly funded, e.g. by the United Nations. Of course, after having developed the basic technique on a public basis, building further plants could be done by anyone as a commercial project.
There are many places in the world where water depth reaches several thousand meters near to the coast. For example, Monterey Bay near to Moss Landing in California, at the south coast of Mexico near Mazunte, at the Pacific coast of Chile, near to Mojácar in Spain, at the south coast of Oman, at the east cost of Taiwan, and so on.
Closing remarks
Not working? In a smaller dimension, it's already done. Look here.
This page is only intended to illustrate a general idea. This is not a construction plan and there were no detailed calculations. Most of the measurements are simply assumptions. Of course, it could (and will have to) be further simplified an improved (e.g. why do we need a fully lined tunnel? Won't a simple rail in a raw hole do it, too?).
But anyway: So far, no one has found a reason why it couldn't work in principle. That's what this is all about. Can anyone find a definitive showstopper? Is there a problem that cannot even be solved in theory?
We'd be happy to discuss with you in our forum. Feel free to tell us your ideas and doubts, find solutions and start new discussions!